مشروع حاجز توقف المركبات التلقائي باستخدام أردوينو Automatic parking barrier with Arduino اكتب تعليقُا

شرح فكرة المشروع
- في هذا المشروع، سنقوم بتصميم نموذج مصغر لحاجز التوقف الموجود في بعض المحطات.
- في الحقيقة، يتم إيقاف المركبات باستخدام حاجز توقف آلي يتم تشغيله عند مرور مركبة أمام جهاز استشعار، أو من خلال زر.
- سنستخدم حساس HC-SR04، المعروف أيضًا بحساس استشعار المسافة بالموجات فوق الصوتية، لاكتشاف العوائق (في هذه الحالة لتحديد وجود المركبة). أما بالنسبة لرفع الحاجز، سنستخدم مايكرو سيرفو.
أدوات المشروع
- اردوينو اونو مع سلك توصيل Arduino Uno: عدد 1
- حساس الترا سونيك HC-SR04 Ultrasonic sensor: عدد 1
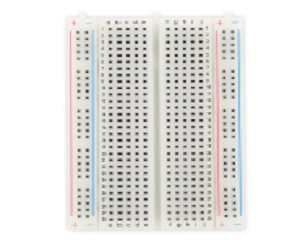
- لوح تجارب 400 نقطة لون ابيض Solderless Breadboard: عدد 1
- محرك سيرفو 180 درجة SG90 Rotation Servo Motor: عدد 1
- أسلاك توصيل ذكر لذكر 40 قطعة 20 سم Male to Male jumper wires
- أسلاك توصيل ذكر انثى 40 قطعة 20 سم Male to Male jumper wires
- 9V Maxell Alkaline Battery بطارية قلوية: عدد 1
- موصل بطارية 9 فولت + مقبس تيار مستمر (غطاء موصل البطارية) Battery snap connector: عدد 1
-
أسلاك وتوصيلات, جميع المنتجات
أسلاك توصيل ذكر لذكر 40 قطعة 20 سم Male to Male jumper wires
لمحة سريعة:
- 40P لون خط DuPont
- الطول: 200 ملم
- الوزن: 30 جم
- متوافق مع رؤوس تباعد 2.54 مم
- 40 قطعة من سلك الانتقال الملون من الذكور إلى الذكور
- جودة عالية وفي حالة عمل جيدة
- متين وقابل لإعادة الاستخدام
- سهل التركيب والاستخدام
SKU: AA045 -
-
-
-
-
مواتير ودرايفرات, جميع المنتجات
محرك سيرفو 180 درجة SG90 Rotation Servo Motor
لمحة سريعة
- الموديل: SG90
- الوزن: 9 جم
- جهد التشغيل: 3.0 فولت ~ 7.2 فولت
- المكونات المؤازرة: JR
للاطلاع على فكرة مشروع تساعدك على برمجة واستخدام هذا المنتج
- عزم الدوران عند الكشك عند 4.8 فولت: 1.2 كجم سم
- عزم الدوران عند الكشك عند 6.6 فولت: 1.6 كجم سم
SKU: AA213 -
البطاريات وملحقاتها, أسلاك وتوصيلات, جميع المنتجات
موصل بطارية 9 فولت + مقبس تيار مستمر (غطاء موصل البطارية) Battery snap connector
 البطاريات وملحقاتها, أسلاك وتوصيلات, جميع المنتجات
البطاريات وملحقاتها, أسلاك وتوصيلات, جميع المنتجاتموصل بطارية 9 فولت + مقبس تيار مستمر (غطاء موصل البطارية) Battery snap connector
لمحة سريعة
- مادة ممتازة
- إنه مشبك بطارية 9V البيئي
- طول الكابل: 12 سم تقريبًا.
- ملائم لتوصيل البطارية بالتطبيق الخاص بك.
- وفر الطاقة وحماية البيئة
- الموصلية الكهربائية الجيدة والشعور المريح باللمس
SKU: AC041







مخطط المشروع