أقسام المتجر المميزة






Product Carousel Tabs

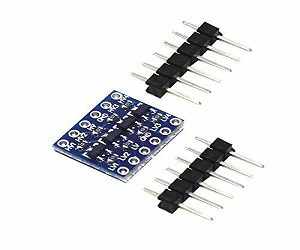
موديول محول مستوى I2C- 4 قنوات Logic Level Converter
لمحة سريعة

راسبيري باي 3 موديل B بلس النسخة المطورة Raspberry Pi
لمحة سريعة
ما الجديد في Raspberry Pi 3 B +

راسبيري باي 3 – موديل B مع اتصال WiFi وبلوتوث Raspberry Pi
لمحة سريعة
حقيبة انا الكتروني لتعليم الاردوينو المتوسطة Arduino Uno Integrated Learning Kit

حقيبة انا الكتروني لتعليم الاردوينو المتوسطة Arduino Uno Integrated Learning Kit
لمحة سريعة
عند شرائك هذه الحقيبة ستحصل على كتاب الكتروني تعليمي لمجموعة رائعة من المشاريع فضلاً اقرأ الوصف
حقيبة انا الكتروني روبوتيكس لتعلم الاردوينو Arduino Uno Robotics Kit

حقيبة انا الكتروني روبوتيكس لتعلم الاردوينو Arduino Uno Robotics Kit
لمحة سريعة
عند شرائك هذه الحقيبة ستحصل على كتاب الكتروني تعليمي لمجموعة رائعة من المشاريع فضلاً اقرأ الوصف
حقيبة انا الكتروني لتعليم الاردوينو الابتدائية Arduino Uno Starter Kit

حقيبة انا الكتروني لتعليم الاردوينو الابتدائية Arduino Uno Starter Kit
لمحة سريعة
عند شرائك هذه الحقيبة ستحصل على كتاب الكتروني تعليمي لمجموعة رائعة من المشاريع فضلاً اقرأ الوصف


ديجيتال ملتيميتر UT33C+ Digital Multimeter
لمحة سريعة
فئة القياس: CAT III 600V.

موديول واي فاي وبلوتوث ESP32 development board
لمحة سريعة
للاطلاع على فكرة مشروع تساعدك على برمجة واستخدام هذا المنتج






SN-390 قابل للتعديل حامل لالواح المطبوعة لوحة دوائر كهربائية Printed Circuit Board Jig Fixture

SN-390 قابل للتعديل حامل لالواح المطبوعة لوحة دوائر كهربائية Printed Circuit Board Jig Fixture
لمحة سريعة
زوج قفاز ESD مضاد للكهرباء الساكنة مع مقاومة لانزلاق الإصبع Pair of anti-static ESD

زوج قفاز ESD مضاد للكهرباء الساكنة مع مقاومة لانزلاق الإصبع Pair of anti-static ESD
قفازات ESD المضادة للكهرباء الساكنة والمضادة للانزلاق مع بقعة مقاومة انزلاق الأصابع مصنوعة من نسيج بوليستر مضاد للكهرباء الساكنة يتكون من البوليستر والألياف الموصلة. مسافة الفصل بين الألياف الموصلة 10 مم

SCT-013-000 مستشعر لتيار الكهربائي المتردد 100 أمبير Transformer ACcurrent sensor

SCT-013-000 مستشعر لتيار الكهربائي المتردد 100 أمبير Transformer ACcurrent sensor
لمحة سريعة
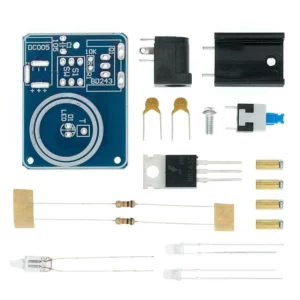
ساعة البطاطس الإبداعية تعمل بطريقة تحويل الطاقة كهروكيميائياً بإستخدام البطاطس وبعض الفواكه الأخرى

ساعة البطاطس الإبداعية تعمل بطريقة تحويل الطاقة كهروكيميائياً بإستخدام البطاطس وبعض الفواكه الأخرى
نظرة سريعة
اللوحة التركيببة لملف تيسلا DIY BD243 Mini Tesla Coil Kit
اللوحة التركيببة لملف تيسلا DIY BD243 Mini Tesla Coil Kit
نظرة سريعة

جهاز ميلتيمتر رقمي Black DT830B Digital Multimeter
نظرة سريعة
ملاحظة: البطارية غير مشمولة (الرجاء استخدام بطارية 9 فولت)
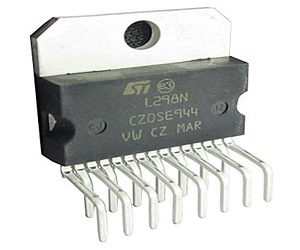
دائرة قيادة محركات L298N Dual Full-Bridge Driver
لمحة سريعة
LM6UU Linear Bearing قطر داخلي 6 ملم وقطر خارجي 12 ملم وارتفاع 19 ملم

LM6UU Linear Bearing قطر داخلي 6 ملم وقطر خارجي 12 ملم وارتفاع 19 ملم
لمحة سريعة:

خلية قياس وزن 10 كجم Weighing Load Cell Sensor
لمحة سريعة
يمكن لخلية تحميل القضيب المستقيمة هذه (تسمى أحيانًا مقياس الضغط) أن تترجم ما يصل إلى 10 كجم من الضغط (القوة) إلى إشارة كهربائية. كل خلية تحميل قادرة على قياس المقاومة الكهربائية التي تتغير في الاستجابة والتناسب مع السلالة (مثل الضغط أو القوة) المطبقة على الشريط.

بطارية قابلة لإعادة الشحن بجهد 6 فولت وسعة 7 أمبير/ساعة Long 6V 7Ah VRLA Battery

بطارية قابلة لإعادة الشحن بجهد 6 فولت وسعة 7 أمبير/ساعة Long 6V 7Ah VRLA Battery
نظرة سريعة
منتجات اردوينو المميزة
-
 اردوينو, جميع المنتجات
اردوينو, جميع المنتجاتMEGA Board 2560 اردوينو ميجا مع كابل طابعة ذكر USB 2.0 A-B
136.00 ر.س150.00 ر.س