أقسام المتجر المميزة






Product Carousel Tabs

اردوينو, جميع المنتجات
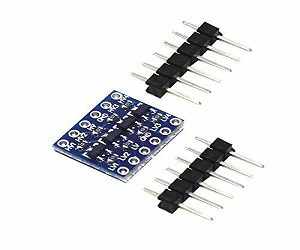
موديول محول مستوى I2C- 4 قنوات Logic Level Converter
لمحة سريعة
تحويل أحادي الاتجاه الجهد العالي إلى الجهد المنخفض
الوحدة متوافقة مع ألواح التجارب ويمكن توصيلها مباشرة بلوح التجارب للاستخدام
تحقيق الاتصال المباشر 5V و 3.3V مستوى المنفذ التسلسلي
أعلى معدل باود الاتصال الثابت هو 28800 بت في الثانية
SKU: NA018

جميع المنتجات, راسبيري باي
راسبيري باي 3 موديل B بلس النسخة المطورة Raspberry Pi
لمحة سريعة
ما الجديد في Raspberry Pi 3 B +
1.4 جيجاهرتز ARM Cortex-A53 رباعي النواة
WLAN 802.11 b / g / n / ac (2،4 + 5،0 جيجا هرتز)
LAN RJ45 10/100/1000 ميجابت (شبكة جيجابت عبر USB 2.0 بسعة تصل إلى 300 ميجابت) إلخ.
SKU: RA358

جميع المنتجات, راسبيري باي
راسبيري باي 3 – موديل B مع اتصال WiFi وبلوتوث Raspberry Pi
لمحة سريعة
ذاكرة الوصول العشوائي: 1 جيجابايت
المعالج: شرائح Broadcom BCM2387 1.2 جيجا هرتز رباعي النواة ARM Cortex-A53 (64 بت)
b / g / n802.11 شبكة LAN لاسلكية وبلوتوث 4.1 (Bluetooth Classic و LE)
التخزين: SD / MMC / SDIO
الطاقة: 5V / 700mA ~ 3A عبر micro USB
SKU: RA432
اردوينو, حقائب تعليم وروبوتات STEM, جميع المنتجات
حقيبة انا الكتروني لتعليم الاردوينو المتوسطة Arduino Uno Integrated Learning Kit

اردوينو, حقائب تعليم وروبوتات STEM, جميع المنتجات
حقيبة انا الكتروني لتعليم الاردوينو المتوسطة Arduino Uno Integrated Learning Kit
لمحة سريعة
مجموعة الكل في واحد ، مجموعة بداية رائعة لتعلم البرمجة.
نوع الموديل: UNO Rev R3
رقاقة متحكم: ATmega328
جهد الإدخال (موصى به): 7-12 فولت
جهد التشغيل: 5
دبابيس الإدخال / الإخراج التناظرية: 6
منافذ الإدخال / الإخراج الرقمية: 14 (منها 6 توفر خرج PWM)
عند شرائك هذه الحقيبة ستحصل على كتاب الكتروني تعليمي لمجموعة رائعة من المشاريع فضلاً اقرأ الوصف
SKU: AE001
اردوينو, حقائب تعليم وروبوتات STEM, جميع المنتجات
حقيبة انا الكتروني روبوتيكس لتعلم الاردوينو Arduino Uno Robotics Kit

اردوينو, حقائب تعليم وروبوتات STEM, جميع المنتجات
حقيبة انا الكتروني روبوتيكس لتعلم الاردوينو Arduino Uno Robotics Kit
لمحة سريعة
مجموعة الكل في واحد ، مجموعة بداية رائعة لتعلم البرمجة.
نوع الموديل: UNO Rev R3
رقاقة متحكم: ATmega328
جهد الإدخال (موصى به): 7-12 فولت
جهد التشغيل: 5
دبابيس الإدخال / الإخراج التناظرية: 6
منافذ الإدخال / الإخراج الرقمية: 14 (منها 6 توفر خرج PWM)
عند شرائك هذه الحقيبة ستحصل على كتاب الكتروني تعليمي لمجموعة رائعة من المشاريع فضلاً اقرأ الوصف
SKU: AE052
اردوينو, حقائب تعليم وروبوتات STEM, جميع المنتجات
حقيبة انا الكتروني لتعليم الاردوينو الابتدائية Arduino Uno Starter Kit

اردوينو, حقائب تعليم وروبوتات STEM, جميع المنتجات
حقيبة انا الكتروني لتعليم الاردوينو الابتدائية Arduino Uno Starter Kit
لمحة سريعة
مجموعة الكل في واحد ، مجموعة بداية رائعة لتعلم البرمجة.
نوع الموديل: UNO Rev R3
رقاقة متحكم: ATmega328
جهد الإدخال (موصى به): 7-12 فولت
جهد التشغيل: 5
دبابيس الإدخال / الإخراج التناظرية: 6
منافذ الإدخال / الإخراج الرقمية: 14 (منها 6 توفر خرج PWM)
عند شرائك هذه الحقيبة ستحصل على كتاب الكتروني تعليمي لمجموعة رائعة من المشاريع فضلاً اقرأ الوصف
SKU: AE038


اجهزة قياس وأدوات, جميع المنتجات
ديجيتال ملتيميتر UT33C+ Digital Multimeter
لمحة سريعة
شاشة LCD مع إضاءة خلفية.
APO ، السعة ، التردد.
دورة العمل: 0.1-99٪.
وظيفة SP: اختبار الصمام الثنائي ، الاستمرارية المسموعة ، الاحتفاظ بالبيانات.
تشير إشارة البطارية المنخفضة.
عمر البطارية: 200 ساعة بشكل نموذجي.
فئة القياس: CAT III 600V.
فئة القياس: CAT III 600V.
SKU: UT033

اردوينو, الاجهزة والمكونات اللاسلكية, جميع المنتجات
موديول واي فاي وبلوتوث ESP32 development board
لمحة سريعة
فلاش مدمج : 32 ميجابت
امدادات الطاقة : 5V
بروتوكول WiFi: IEEE 802.11 b / g / n
الواجهة الطرفية : UART / GPIO / ADC / DAC / SDIO / PWM / I2C / I2S
مستوى المنطق : 3.3V
للاطلاع على فكرة مشروع تساعدك على برمجة واستخدام هذا المنتج
SKU: NA396






بوردات ولوحات نحاسية, جميع المنتجات, مستلزمات اللحام
SN-390 قابل للتعديل حامل لالواح المطبوعة لوحة دوائر كهربائية Printed Circuit Board Jig Fixture

بوردات ولوحات نحاسية, جميع المنتجات, مستلزمات اللحام
SN-390 قابل للتعديل حامل لالواح المطبوعة لوحة دوائر كهربائية Printed Circuit Board Jig Fixture
لمحة سريعة
الحد الأقصى لحجم لوحة الدائرة الكهربائية: 20 * 14 سم
سمك لقط لوحة الدائرة: 1.2 / 1.8 / 2.0 / 3.0mm
حجم المنتج: 30 * 16.5 * 12.5 سم
الوزن: 325 جرام
SKU: NC303
جميع المنتجات, مستلزمات اللحام
زوج قفاز ESD مضاد للكهرباء الساكنة مع مقاومة لانزلاق الإصبع Pair of anti-static ESD

جميع المنتجات, مستلزمات اللحام
زوج قفاز ESD مضاد للكهرباء الساكنة مع مقاومة لانزلاق الإصبع Pair of anti-static ESD
قفازات ESD المضادة للكهرباء الساكنة والمضادة للانزلاق مع بقعة مقاومة انزلاق الأصابع مصنوعة من نسيج بوليستر مضاد للكهرباء الساكنة يتكون من البوليستر والألياف الموصلة. مسافة الفصل بين الألياف الموصلة 10 مم
SKU: RA210


جميع المنتجات, حساسات
LM393 حساس اختبار سرعة المحرك Sensor Groove Coupler Module
لمحة سريعة:
باستخدام مستشعر اقتران بصري، عرض 5 مم.
لديها ضوء حالة الإخراج ، إذا كان مستوى الإخراج مرتفعًا ، فإن الأضواء مطفأة. إذا كان مستوى الإنتاج منخفضًا ، فسيتم تشغيله.
إذا تم تغطيتها ، فسوف تنتج مستوى عالٍ ؛ خلاف ذلك ، مستوى إنتاجها منخفض.
إشارة جيدة وشكل موجة جيد ، مع قدرة قيادة قوية لأكثر من 15 مللي أمبير.
مجهزة بفتحة الترباس الثابتة ، سهلة التركيب.
SKU: NB076

الطباعة ثلاثية الأبعاد, جميع المنتجات
خيط filament لون ازرق من نوع eSUN PLA+ 1.75mm للطابعة ثلاثية الأبعاد

الطباعة ثلاثية الأبعاد, جميع المنتجات
خيط filament لون ازرق من نوع eSUN PLA+ 1.75mm للطابعة ثلاثية الأبعاد
نظرة سريعة
+filament PLA من eSUN، مصمم للطابعات ثلاثية الأبعاد.
اللون: أزرق
القطر: 1.75مم
الوزن الصافي: 1 كيلوغرام
PLA+ هو نوع من PLA، لكن يضاف إليه مواد أخرى لتقليل الهشاشة، والحصول على أشكال ذات أسطح ملساء، وتقليل امتصاص الرطوبة.
تحقيق الالتصاق بقاعدة الطابعة بدون الحاجة إلى وضع سطح ساخن.
يوفر طباعة سهلة بتفاصيل دقيقة، وتدفق سريع ومرن أثناء الطباعة.
منتج غير سام، غير ضار بالبيئة، ولا يصدر الروائح الكريهة أو الأبخرة أثناء الطباعة.
SKU: XV468

اردوينو, جميع المنتجات
درع شبكة إيثرنت W5100 Shield Network Expansion Board
لمحة سريعة
تسمح للوحة الاردوينو بالاتصال بالإنترنت .
يدعم ما يصل إلى أربعة اتصالات مقبس متزامنة
يمكن استخدامه لتخزين الملفات للعرض عبر الشبكة.
يمكن الوصول إليها باستخدام مكتبة Mini SD TF.
متوافق مع IEEE802.3af
تموج وضوضاء منخفضة (100mVpp)
SKU: AA009

الاجهزة والمكونات اللاسلكية, جميع المنتجات
لوحة محول VCC 3.3 فولت لـ NRF24L01
لمحة سريعة:
يسمح بالاتصال السهل بوحدات nRF24L01 +
قوة صغيرة على مؤشر LED SMD
منظم الجهد على متن الطائرة:
جهد إدخال منظم الجهد (متصل بـ VCC): 4.8 فولت إلى 12 فولت
الحد الأقصى لجهد إدخال منظم الجهد: 15 فولت (نوصي بالبقاء أقل من 12 فولت)
للاطلاع على فكرة مشروع تساعدك على برمجة واستخدام هذا المنتج
SKU: AA265



الطباعة ثلاثية الأبعاد, جميع المنتجات
خيط filament لون أصفر من نوع eSUN PLA+ 1.75mm للطابعة ثلاثية الأبعاد

الطباعة ثلاثية الأبعاد, جميع المنتجات
خيط filament لون أصفر من نوع eSUN PLA+ 1.75mm للطابعة ثلاثية الأبعاد
نظرة سريعة
+filament PLA من eSUN، مصمم للطابعات ثلاثية الأبعاد.
اللون: أصفر
القطر: 1.75مم
الوزن الصافي: 1 كيلوغرام
PLA+ هو نوع من PLA، لكن يضاف إليه مواد أخرى لتقليل الهشاشة، والحصول على أشكال ذات أسطح ملساء، وتقليل امتصاص الرطوبة.
تحقيق الالتصاق بقاعدة الطابعة بدون الحاجة إلى وضع سطح ساخن.
يوفر طباعة سهلة بتفاصيل دقيقة، وتدفق سريع ومرن أثناء الطباعة.
منتج غير سام، غير ضار بالبيئة، ولا يصدر الروائح الكريهة أو الأبخرة أثناء الطباعة.
SKU: XV471

منتجات اردوينو المميزة
-
اردوينو, جميع المنتجات
MEGA Board 2560 اردوينو ميجا مع كابل طابعة ذكر USB 2.0 A-B
136.00 ر.س150.00 ر.س